DOGE
WHAT GOES UP...
TO DATE
LEARNED
APOGEE

OVERVIEW
72 cm
64 mm
807 g
850 m
Glass Fiber
...MUST COME DOWN
What happens when, while designing your first rocket, you realize that a altitude of 850 meters is actually pretty high? The natural response is to try to get the rocket back to the ground as quickly and safely as possible, and that’s exactly what a two-stage recovery system is for. It first deploys a smaller parachute (or streamer), which slows the rocket down but still allows for a relatively fast descent. At a selected altitude above the ground, the main parachute is then activated, ensuring a safe and soft landing.
We have used this system in our first rocket, Doge. At the highest point of the flight, a streamer—a strip of specially composed material—was supposed to deploy; by “fluttering,” it increases air resistance and slows the descent. At an altitude of approximately 150 meters, the main parachute was then supposed to open. However, the reality of the flight demonstrated just how important system resilience and redundancy are. Vibrations caused by the rocket motor during ascent loosened the connector responsible for deploying the streamer, so it failed to activate. During the subsequent descent, the main parachute also failed to open due to high speed and airflow.
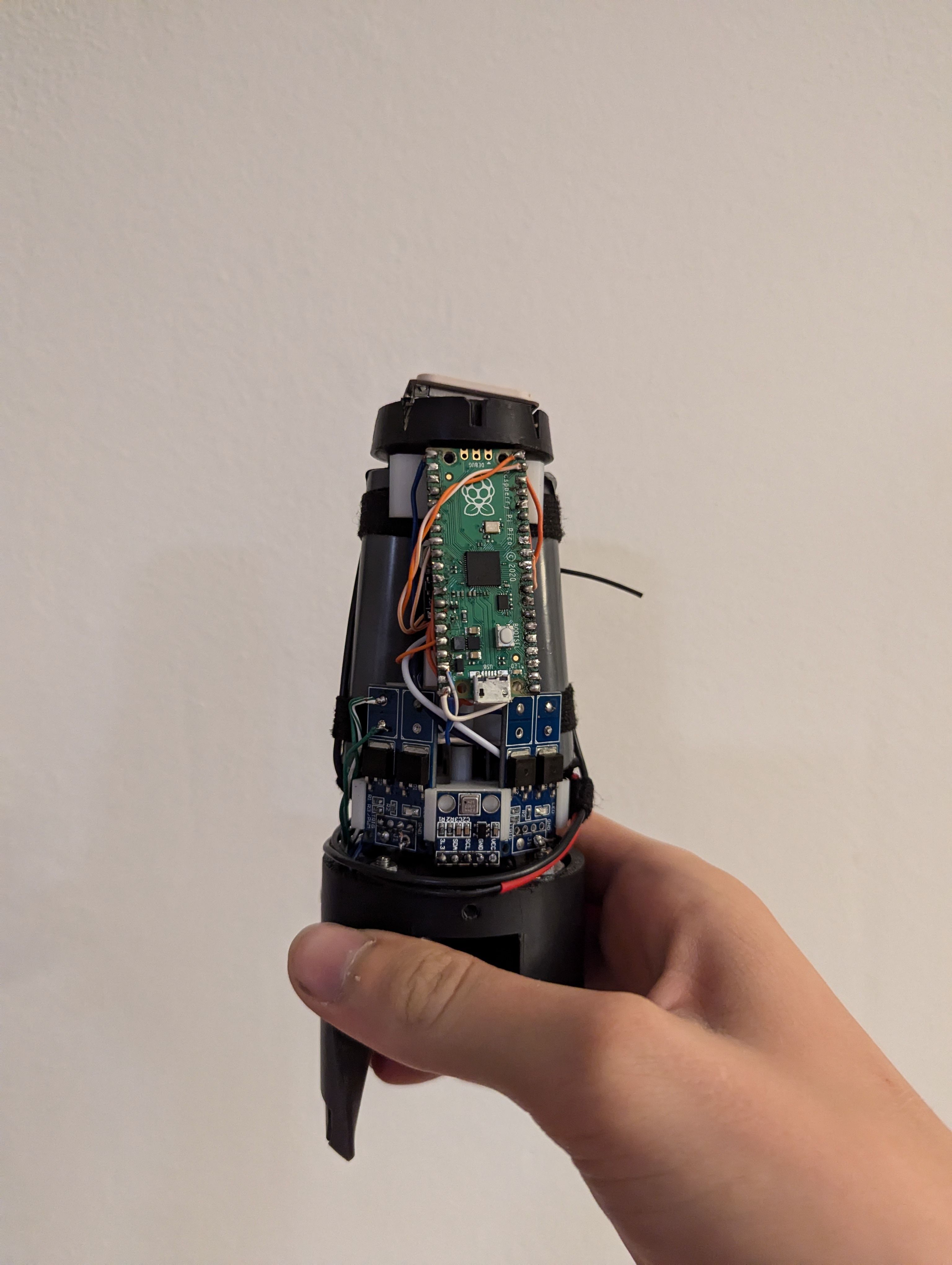
The rocket thus buried itself approximately 40 cm into the ground upon impact. Nevertheless, one positive aspect emerged: the onboard electronics proved to be very robust and survived the impact with almost no damage. The only exception was the GPS module at the tip, which did not withstand the impact.

ROCKETS 101
Doge was our first step into the world of larger rockets. It began to take shape in early 2024 as a project by three enthusiasts who, up until then, had only experience with “dumb” rockets—that is, those where the maximum flight altitude is calculated in advance and the delay for the pyrotechnic charge that deploys the parachute is set accordingly.
Doge, however, marked a major shift. For the first time, we worked with an electronically controlled recovery system and live telemetry transmitted to a ground station. During development, however, we quickly realized that our programming experience wasn’t sufficient for such a system, so we expanded the team to include another member.
With this rocket, we competed in the Czech Rocket Challenge in the advanced category. Even though we were still beginners, we decided to go straight into the more demanding category because the basic one didn’t present enough of a challenge for us. We managed to complete the competition mission itself; the rocket successfully communicated with the ground, even though we weren’t sure until the very last moment whether everything would work according to plan.
However, as mentioned above, the “landing” didn’t go perfectly. Nevertheless, Doge became a major milestone that set us on a path we hadn’t even dreamed of at the beginning.